|
ROS-UVS
1.0.0
A Minimalistic ROS Library for Visual Constraint Minimization through Uncalibrated Visual Servoing
|
|
ROS-UVS
1.0.0
A Minimalistic ROS Library for Visual Constraint Minimization through Uncalibrated Visual Servoing
|
#include <ros/ros.h>#include <Eigen/Core>#include "sensor_msgs/JointState.h"#include "geometry_msgs/PoseStamped.h"#include "visual_servoing/JointMove.h"#include "visual_servoing/robot_controller.h"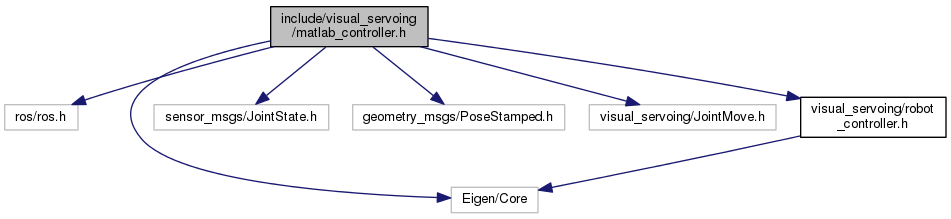
Go to the source code of this file.
Classes | |
| class | MatlabController |
 1.8.6
1.8.6 
