|
ROS-UVS
1.0.0
A Minimalistic ROS Library for Visual Constraint Minimization through Uncalibrated Visual Servoing
|
|
ROS-UVS
1.0.0
A Minimalistic ROS Library for Visual Constraint Minimization through Uncalibrated Visual Servoing
|
#include <Eigen/Core>#include <Eigen/SVD>
Go to the source code of this file.
Functions | |
| template<typename _Matrix_Type_ > | |
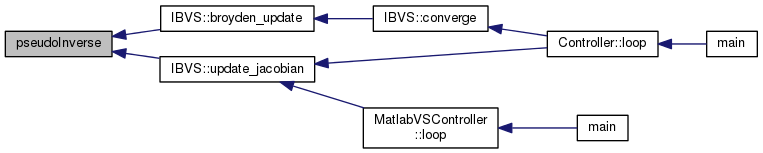
| bool | pseudoInverse (const _Matrix_Type_ &a, _Matrix_Type_ &result, double epsilon=std::numeric_limits< typename _Matrix_Type_::Scalar >::epsilon()) |
| Moore-Penrose pseudoinverse. More... | |
| bool pseudoInverse | ( | const _Matrix_Type_ & | a, |
| _Matrix_Type_ & | result, | ||
| double | epsilon = std::numeric_limits<typename _Matrix_Type_::Scalar>::epsilon() |
||
| ) |
Moore-Penrose pseudoinverse.
Implementation taken from: http://eigen.tuxfamily.org/bz/show_bug.cgi?id=257
 1.8.6
1.8.6 
