a. Construct the mid-point and mid-lines of the football field in the image below. (1)
b. Constructing mid line in video sequence (1)
c. Parallel lines and line-to-line (1)
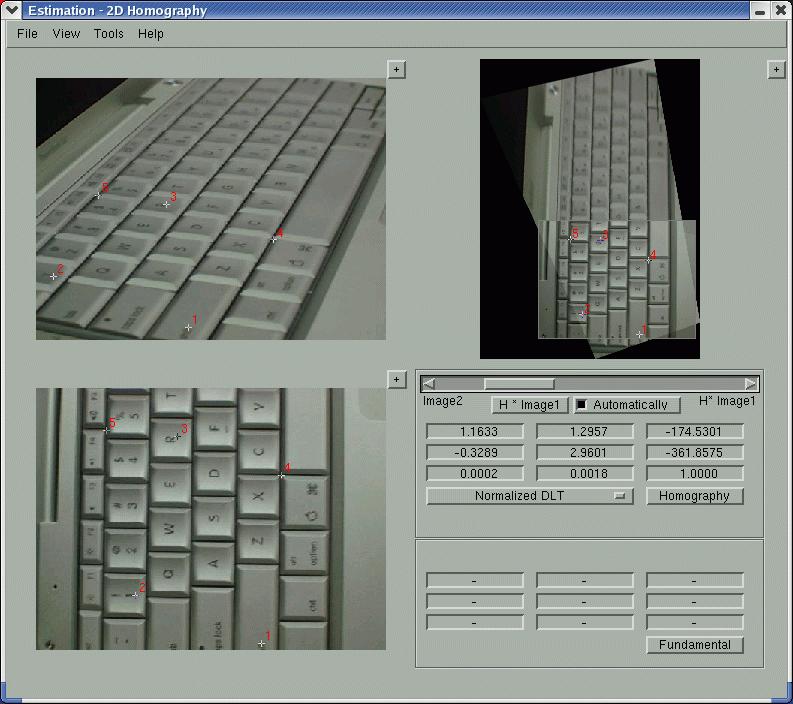
Given two images of a planar scene and a set of four or more 2D point
correspondences between the images (
xi <--> x'i
), compute the homography, H, which relates one image to the other, and then apply H to the first image to see if you get similar image as the second one.
Some useful commands in matlab to select files and points:
imgetfile, cpselect, uigetfile, getpts and possibly many others. Use doc in matlab command window or google the relevant commands.
(a). (1.5) Write a matlab program that displays two images. Allow the user to
select four or more points in each image. Use these correspondences to
estimate the homography by the direct linear transform algorithm (DLT).
Apply the homography to the first image, such as using imwarp.
For imwarp, you may need to use the transpose of your homography matrix, and may want to set the 'OutputView' argument to preserve the size of the image.
(b). (1) Recall that in DLT we need to constrain the magnitude of the homography H to be strictly positive, which is usually done by constraining the Euclidean norm of H to be 1 (as in (a)). We also need a loss function on the residual Ah, which is again usually done by the Euclidean norm (as in (a)). Replace the loss function by the L1 norm (sum of absolute values) and do (a) again.
A numerical procedure to solve the L1 norm based DLT is outlined here. Graduate students are welcome (but not compulsory) to come up with their own numerical procedures.
(c). (1) Add the normalization procedure into the DLT algorithm (in both (a) and (b)): For
undergraduate students, translate the points such that they center around the origin, then
scale the points such that their sum of distances to the origin is fixed to root 2; For
graduate students, use principal component analysis to center the points and normalize the
variances in different principal axes to unity. Please do NOT forget to apply the inverse normalization after estimating the homography.
(d). Discussion (1)
Compare (a) and (b) by deliberately picking some pair(s) of points that do not correspond to each other (i.e., outliers). Here is what I will do for the comparison: Choose perfect correspondences first and estimate the homography H by (a) and (b), then ruin some correspondence(s) and run (a) and (b) again, how significantly will the estimated homography change? (You can apply the homography to the image and see how the recovery changes). Repeat what you have done with (c) turned on.
Use the sample images below or capture your own.

Provide comments for each step of your implementation.
I expect your implementation to have flags that can switch between (a) and (b), and can turn normalization (c) on and off.
- After the homography is applied, do the overlapping areas in the two images look exactly the same? Why / why not?
- Correspondences are not always perfect. What happens if some of the correspondences are incorrect? How can this be handled?
- This method is being used to align two images of a planar surface. Can it be used to align images of non-planar objects? What conditions need to be met?
- What if we only have four or more corresponding pairs of lines, instead of points? Or some pairs of points and some pairs of lines? Will the algorithm still work (under obvious modifications)?