Small Scale Robot Arm
Manuipulation for Large Scale Robot with Feedback
Abstract:
Our idea is to create a tele-operational robot that has as a controller a
smaller scale replica that the user can manipulate. The user will be able to
manipulate the small robot and the corresponding joint manipulations will be
converted to the movements of the large scale robot. Furthermore, the large
scale robot will produce feedback to the user so the user knows if contact
has been made with a barrier or object. The small scale robot will be
remotely operated and ideally will be operational in a separate remote
location.
Motivation:
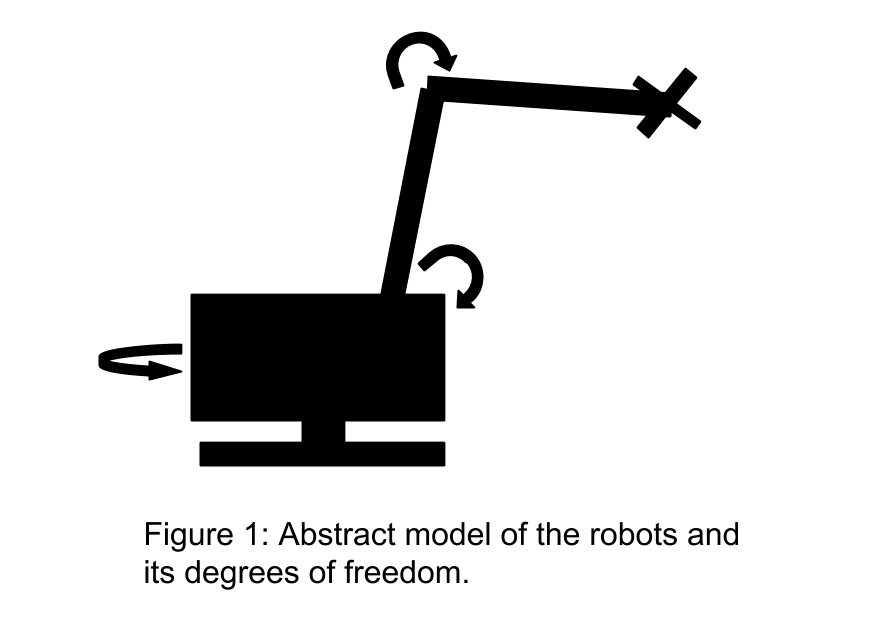
The motivation for this robot is to eliminate the use of a joystick that
only has 2 degrees of freedom to a small scale robot that will have the same
degrees of freedom that the robot arm has. This would ideally increase the
speed of the robot control from the previous joystick method. Moreover, having the robot control in a remote location would help serve the purpose
of allowing for manipulation tasks in locations that humans would be unable
to reach. Also this task would only require the movement of the wrist and
hand and thus may apply to persons in a wheelchair or people with reduced
reaching abilities. The added feedback would serve the purpose of allowing
the user to know when the robot is not moving due to the physical
constraints around the robot such as a wall or post, and additionally
knowing when an object is within grasp.
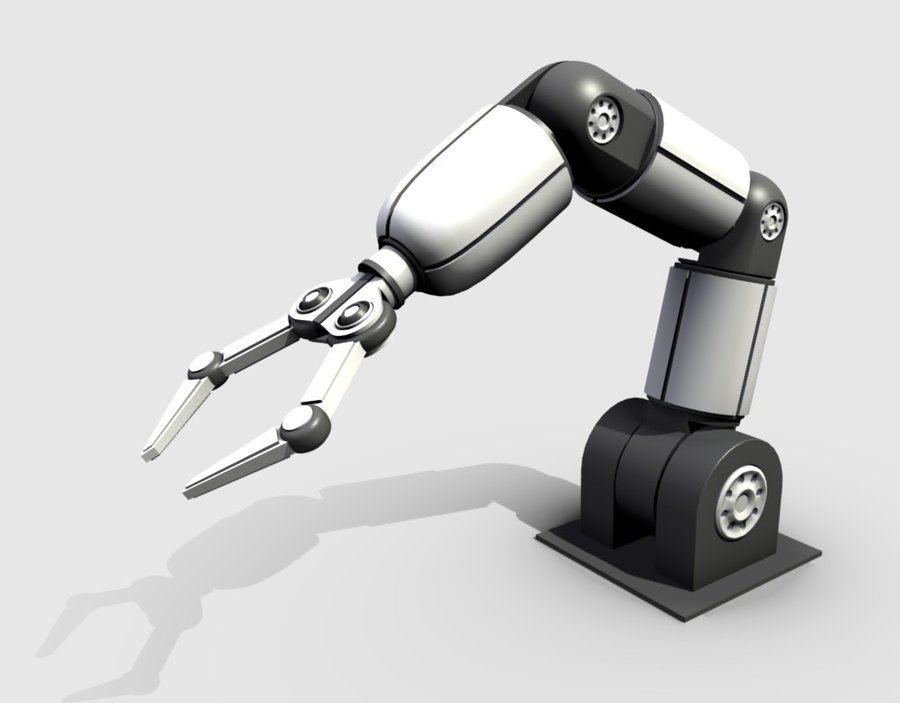
 Figure
2: Our Robot Prototypes
Figure
2: Our Robot Prototypes
Christoph Sydora and
Diego Luces
Comput 412 - Winter 2015