EV3YE
The EV3YE project is an extensible framework for teleoperation of the Lego Mindstorms EV3 kit.

The EV3YE project is an extensible framework for teleoperation of the Lego Mindstorms EV3 kit.

Intuitive control of mobile robots is one of the major barriers to their widespread adoption. Systems exist, but they are costly to purchase and operate. Our goal was to create an extensible system for controling mobile robots, both with teleoperation, and semi-autonomous methods.

In many scenarios, manual control is the best. If it's intuitive enough, then manual teleoperation can be picked up instantly and used to control the robot in just about any environment, and it avoids the quirks and performance load of complex autonomy.
In the EV3YE, we've developed manual controls using a gamepad, touchscreen and tilt controls.
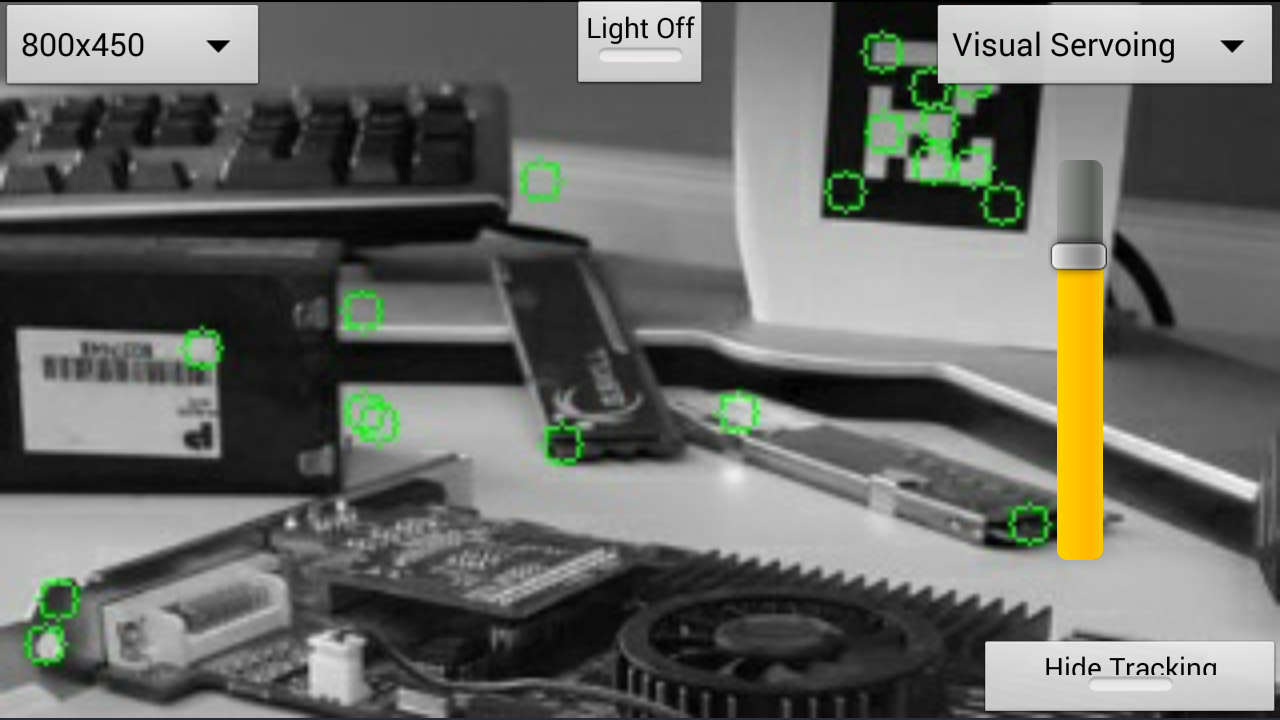
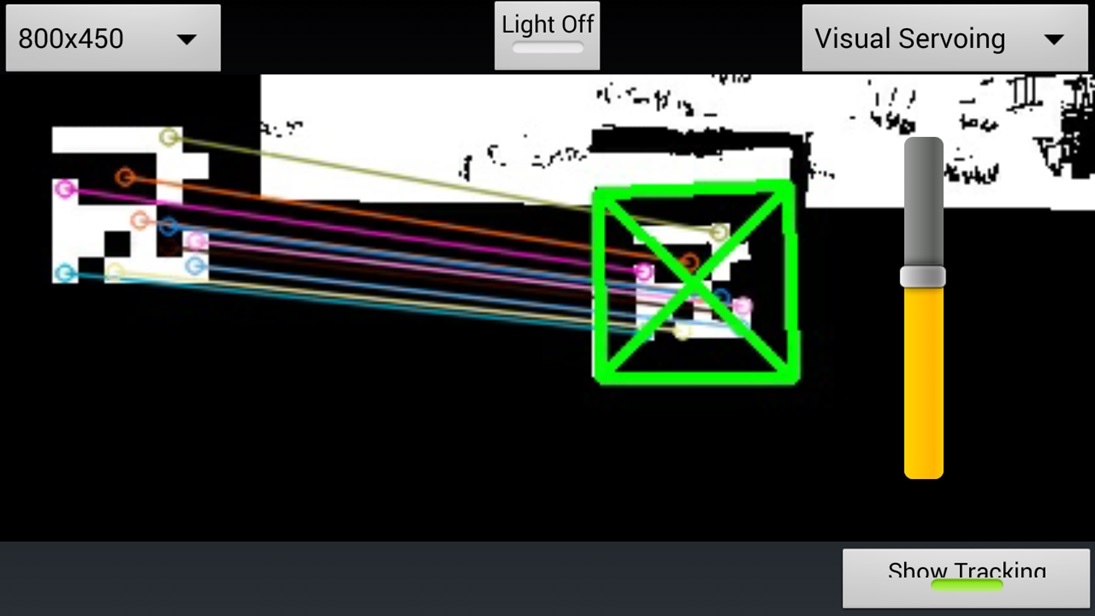
It can be extremely benificial if the robot can navigate itself in a wide variety of environments. Using OpenCV, we've developed a robust visual servoing system that can find and track targets in arbitrary environments.