1) Path Planning
-
Add the following functionalities to your 2DOF robot arm:
- Draw a straight line defined by two points.
- Draw a straight line defined by a point, angle with respect to an horizontal axis and distance. (optional)
- Draw an arc defined by n points. (optional)
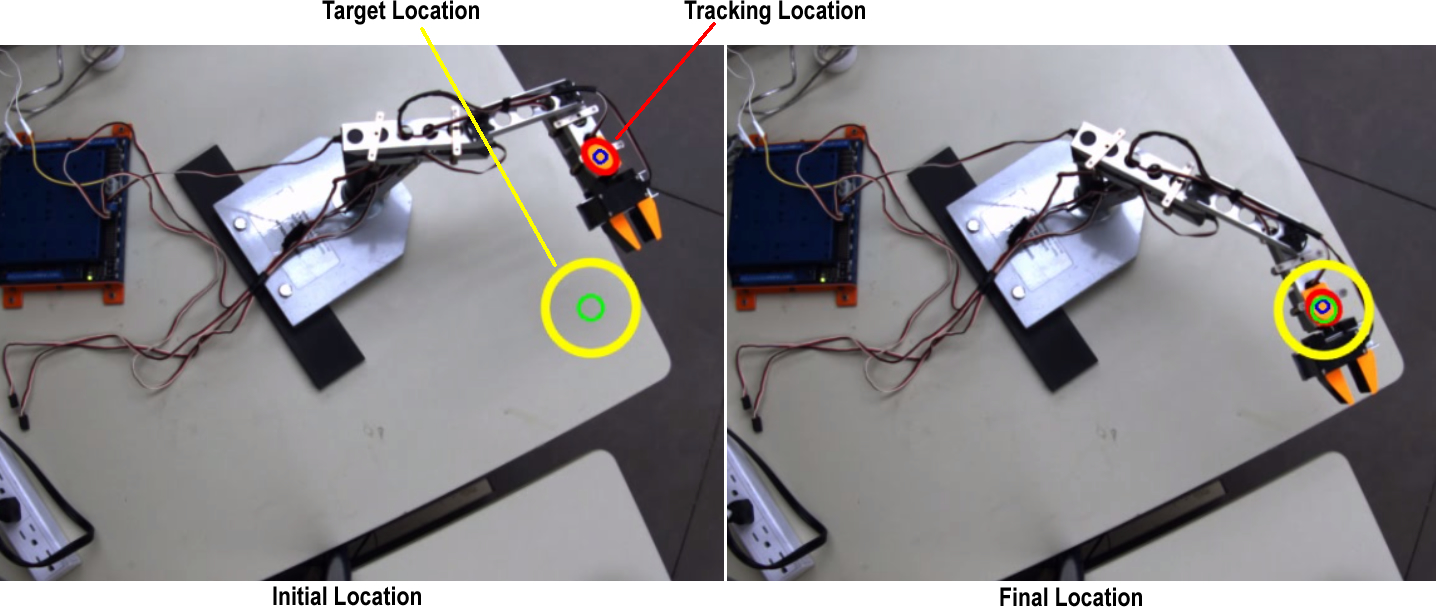
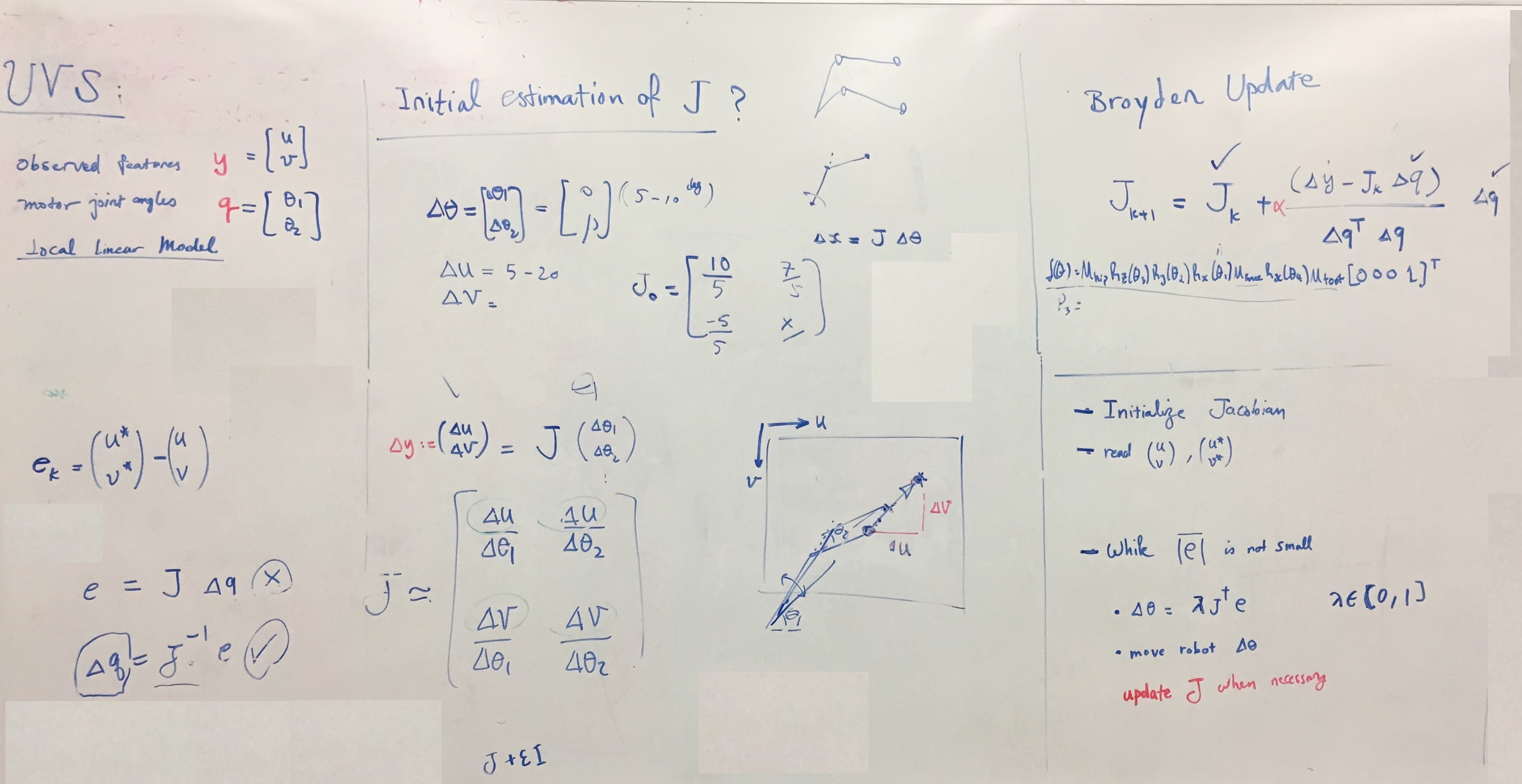
2) Uncalibrated Visual Servoing (UVS)
-
Implement Uncalibrated Visual Servoing (UVS) to move your 2-DOF planar robot arm to a desired position. Your program should be able to dynamically track the end-effector of your robot and a moving target. Tip: OpenCV has tracking modules you can use.
- Estimate the initial Jacobian. Tip: You can do that using orthogonal motions
- Define a stop criteria for your looping algorithm
- Implement Broyden update
- Calculate Xdot base on the local linear model
- Update X (motor joint angles)
These are some useful steps that you will need to do for your implementation:
{kind=link}